
Post
控制柜接线进展:加入 XYZ 伺服系统与固高运动控制板
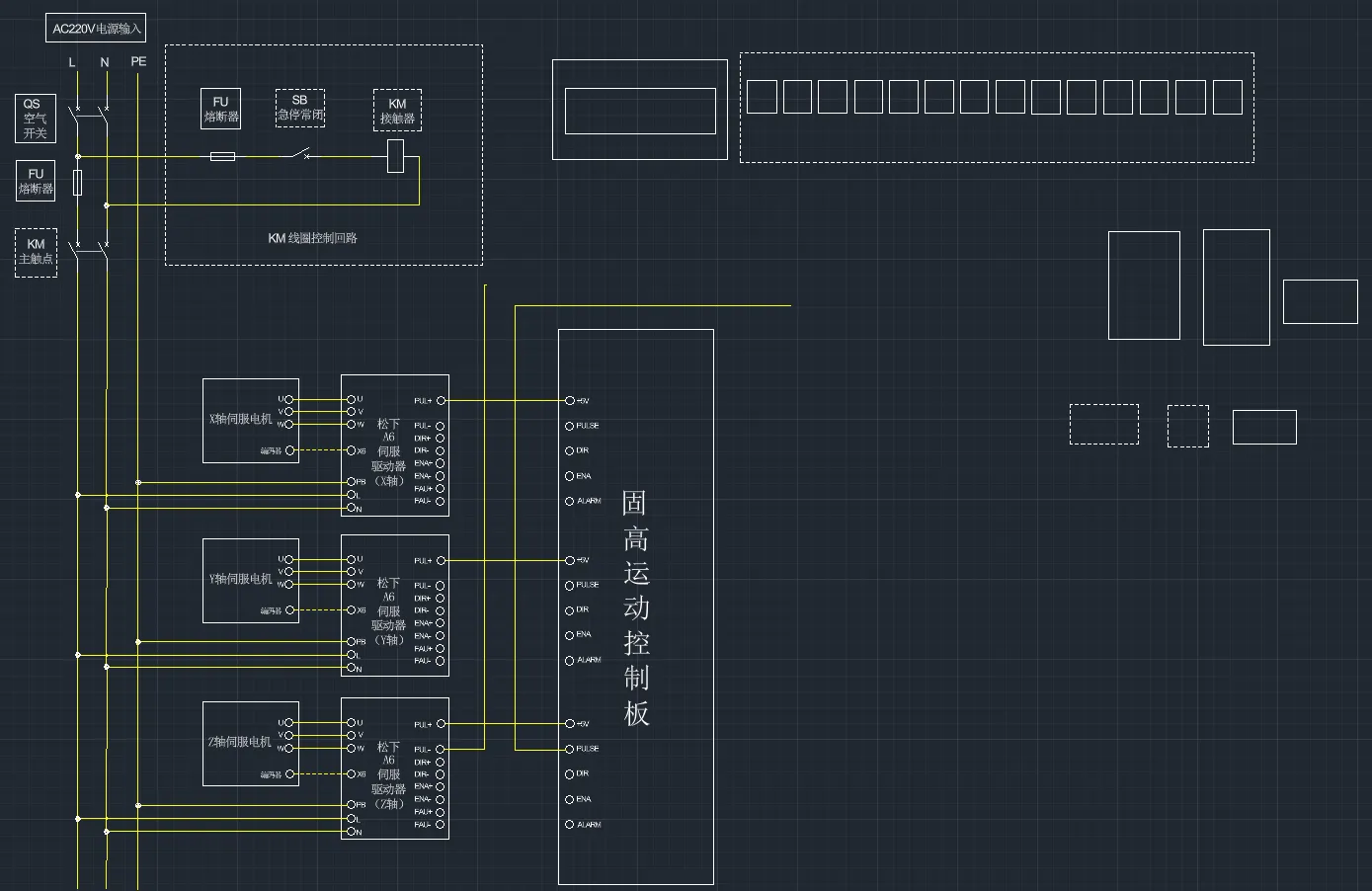
纸叠式三维打印机控制柜电气接线图继续推进,在昨天的 AC220V 主回路基础上加入 XYZ 三轴伺服电机、松下 A6 驱动器、固高运动控制板,以及驱动器与控制板之间的 PUL/DIR/ENA/ALARM 等信号线。
控制柜接线进展:加入 XYZ 伺服系统与固高运动控制板
今天继续完善纸叠式三维打印机的控制柜电气接线图,重点是把系统的运动控制部分画了进去。
一、昨天的工作回顾
昨天主要完成的是 AC220V 电源输入部分,包括:
- QS 空气开关
- FU 熔断器
- KM 接触器主触点
- KM 线圈控制回路
- PE 保护接地排的分配接线
这部分今天保留在图的左侧不动,作为整张图的”强电入口”。
二、今天新增:XYZ 三轴伺服系统
在昨天的基础上,今天把运动控制部分铺开了,新增了 X、Y、Z 三个轴的伺服系统。图中已经加入:
- XYZ 三轴伺服电机
- 三套对应的松下 A6 伺服驱动器
- 驱动器到电机的基本连接:
- U、V、W 三相电机动力线
- PE 接地线
- 编码器线
也就是说,每一根伺服轴都按”驱动器 → 电机 + 编码器反馈”的标准接法画好了动力侧的连线。
三、今天新增:固高运动控制板与控制信号
光有动力线还不够,伺服真正”动起来”需要上位的脉冲指令。所以今天还加入了固高运动控制板,并开始把控制板与三台伺服驱动器之间的控制信号连接起来,目前已画出:
- PUL+ / PUL−:脉冲信号(控制速度与位置)
- DIR+ / DIR−:方向信号
- ENA:使能信号
- ALARM:报警反馈信号
至此,今天的重点已经从单纯的强电供电部分,推进到了**「运动控制板 → 伺服驱动器 → 伺服电机」**这条完整的控制信号链。
四、布局优化:KM 线圈控制回路独立框出
为了让图看起来更清楚,今天也把 KM 线圈控制回路单独框出来了,与主电源回路在视觉上分离,避免强电与控制混在一起辨认困难。整张图的左侧仍是:
AC220V 输入 → QS → FU → KM 主触点 → 分配端子排 → PE 保护地
控制回路则单独成区块。
五、整体进度
相比昨天,今天的图多了:
- 三套伺服轴(电机 + 驱动器)
- 一块固高运动控制板
- 控制板与驱动器之间的信号线
- KM 控制回路单独框出的布局优化
系统的完整度比昨天更高,下一步打算继续把限位开关、急停回路、24V 控制电源等剩余部分补上。
Discussion
Comments
Share questions, corrections, or extra notes about this post.